Stress test comparatif, en première mondiale, pour le Raymarine Docksense
Après avoir assisté à la présentation du système lors du Boot de Dussedorlf, nous ne pouvions pas nous abstenir de vérifier si les caractéristiques, si innovantes que théoriques à ce moment-là, correspondaient réellement à la possibilité concrète de faciliter ce qui est la plus stressante des manœuvres: l’amarrage.
Nous n’avons donc pas laissé passer l’occasion d’essayer le Raymarine DockSense et, pendant le Miami International Boat Show, nous l’avons testé en combinaison avec les deux systèmes joysticks les plus répandus dans le monde: le Mercury Joystick Piloting System et le Volvo Penta Electronic Vessel Control.
Ce que nous vous pouvons anticiper dès maintenant est que la défense virtuelle de Raymarine fonctionne bien avec tous les deux systèmes et, même si l’on voulait (intentionnellement) entrer en collision avec un ponton, il ne le permettrait pas. Mais procédons par étapes et voyons ce qu’il s’est passé.
Test Raymarine DockSense avec Mercury Joystick Piloting System
Je monte à bord du Boston Whaler 330 Outrage, un bateau ouvert avec un poids de 4 tonnes et je fais une petite inspection tout de suite pour comprendre la configuration du système DockSense intégré avec le Mercury Joystick Piloting System.


Le bateau est équipé de 5 caméras Flir, spécialement desinnées pour être les “yeux” du système. Elles sont positionnées une par côté, avec une supplémentaire à l’avant afin de garantir une vision de 360 degrés. Tout l’équipement du bateau est, évidemment, Raymaine et les écrans Axiom de dernière génération lui permettent de s’interfacer avec le logiciel Lighthouse et, donc, avec le système DockSense qui en représente une extension.
 Le système Joystick Piloting System s’intègre avec le réseau grâce à DockSense qui sert de véritable bras exécutif, ou mieux, d’actionneur du système. En plus, une commande à quatre boutons est positionnée à la droite du joystick. Les flèches sur chaque bouton indiquent un côté du bateau.
Le système Joystick Piloting System s’intègre avec le réseau grâce à DockSense qui sert de véritable bras exécutif, ou mieux, d’actionneur du système. En plus, une commande à quatre boutons est positionnée à la droite du joystick. Les flèches sur chaque bouton indiquent un côté du bateau.
Les techniciens de Raymarine m’expliquent que, en appuyant sur les boutons, une lumière s’allume et la défense virtuelle s’active. Je démarre les moteurs, active le joystick et sors.
Le premier essai que je veux effectuer est une simple marche arrière avec le bateau déjà aligné pour l’amarrage. Le côté de tribord est livre tandis que, à l’arrière et sur le côté de bâbord, je trouve le ponton.
 J’appuie sur les boutons correspondants aux côtés en “danger” et j’active la défense virtuelle. Je pousse le levier du joystick à l’arrière et le Boston Whaler entre dans le mouillage. Une fois entré, je maintiens la pression sur le levier en dirigeant la poupe vers le ponton. Ma commande est ignorée et le DockSense prend le contrôle.
J’appuie sur les boutons correspondants aux côtés en “danger” et j’active la défense virtuelle. Je pousse le levier du joystick à l’arrière et le Boston Whaler entre dans le mouillage. Une fois entré, je maintiens la pression sur le levier en dirigeant la poupe vers le ponton. Ma commande est ignorée et le DockSense prend le contrôle.
Les deux Verado 300 commencent à manœuvrer, le bateau ralentit, la vitesse inertielle diminue et la distance du danger se mantient constante.
J’essaie de diriger le bateau vers le ponton de gauche mais, encore une fois, la défense virtuelle rend cela impossible. La distance de sécurité précédemment définie était de 3 pieds et, en effet, le Boston Whaler respecte précisement cette mesure.
Maintenant, je veux voir ce qui se passe si je laisse le bateau sans mon contrôle direct dans l’ U représentée par les trois bras du pont qui m’entourent. J’enlève mes mains des commandes et, avec ma grande surprise, le Boston reste immobile là où je l’avais laissé tandis que le système manœuvre pour tenir la position.
Il  fonctionne et, donc, j’essaie de rendre les choses en peu plus difficiles. Je sors à nouveau du mouillage mais, cette fois, le bateau est mal aligné comme s’il y avait du vent de travers ou j’avais mal amarré. J’active la défense virtuelle sur tous les quatre côtés et j’essaie de me montrer sous mon plus mauvais. Je dirige alors le coin de droite de la poupe vers l’angle du mouillage qui se trouve sur le même côté.
fonctionne et, donc, j’essaie de rendre les choses en peu plus difficiles. Je sors à nouveau du mouillage mais, cette fois, le bateau est mal aligné comme s’il y avait du vent de travers ou j’avais mal amarré. J’active la défense virtuelle sur tous les quatre côtés et j’essaie de me montrer sous mon plus mauvais. Je dirige alors le coin de droite de la poupe vers l’angle du mouillage qui se trouve sur le même côté.
Encore une fois, le système s’active et ma commande est ignorée. J’insiste, je tourne la proue à droite et le bateau légèrement à gauche et j’essaie à nouveau d’aller contre le ponton avec un mouvement de marche arrière.
Le côté de gauche maintient la distance et, avec cette manœuvre, je découvre un nouveau avantage de DockSense.
 En effet, je suis entré dans le mouillage tandis que le bateau s’est comporté exactement comme lorsqu’on utilise une défence somme axe central sur un obstacle.
En effet, je suis entré dans le mouillage tandis que le bateau s’est comporté exactement comme lorsqu’on utilise une défence somme axe central sur un obstacle.
La différence est que, dans ce cas, la défense était virtuelle et couvrait toute la longueur de la coque.
Mon test terminé, j’amarre, éteins la défense sur le côté de gauche de façon à pouvoir descendre sans problèmes.
Il faut toutefois faire un peu d’attention dans ce cas parce que le système, une fois éteint, ne contrôle plus le côté et donc, si le courant ou le vent sont en train de pousser dans cette direction, on purrait risquer de finir avec le bateau contre le ponton.
Test Raymarine DockSense avec Volvo Penta Electronic Vessel Control
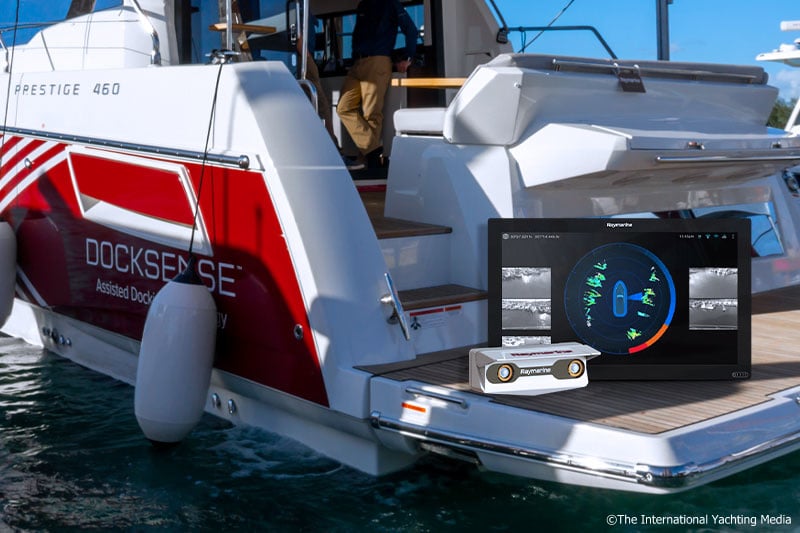
Après mon test sur  le bateau le plus petit, j’ai finalement une pierre de touche et je peux donc effectuer mon deuxième test du Raymarien DockSense à bord du Prestige 460.
le bateau le plus petit, j’ai finalement une pierre de touche et je peux donc effectuer mon deuxième test du Raymarien DockSense à bord du Prestige 460.
Le bateau est équipé d’un système Joystick différent, il est plus grand, plus lourd et, évidemment, motorisé par une propulsion IPS in bord-hors bord et une hélice de proue.
Dès que je monte à bord, je réalise tout de suite que les choses sont légèrement différentes. Ici, les commandes se trouvent à l’intérieur du bateau. Par conséquent, je n’aurai pas la même perception des obstacles que j’ai eu avant.
Peu mal, c’est une bonne occasion pour utiliser réellement les “yeux de Docksense”.
 J’active sur les écrans Axiom les images en temps réel des caméras et je regarde avec plus d’attention l’écran qui traduit, comme une vision radar, les obstacles détectés dans une seule image à 360 degrés. De cette façon, j’aurai une vision avancée et technologique à laquelle pourvoir faire référence. En vérité, ces écrans étaient disponibles sur le Boston mais, là, je n’ai jamais eu besoin d’eux.
J’active sur les écrans Axiom les images en temps réel des caméras et je regarde avec plus d’attention l’écran qui traduit, comme une vision radar, les obstacles détectés dans une seule image à 360 degrés. De cette façon, j’aurai une vision avancée et technologique à laquelle pourvoir faire référence. En vérité, ces écrans étaient disponibles sur le Boston mais, là, je n’ai jamais eu besoin d’eux.
Nous démarrons les moteurs et sortons. Ici, je n’ai pas de commandes à boutons pour activer et désactiver la défense virtuelle sur chaque côté. Je peux le faire directement depuis le système central.
Je prends le Joystick de Volvo Penta et je commence à effectuer mes manœuvres à l’aide des caméras et, encore une fois, DockSense fonctionne très bien. Il maintient les distances des obstacles et me permet d’entrer dans le mouillage facilement.
J’arrête le bateau avec le côté droit à proximité d’un obstacle, je laisse le joystick de commande et le bateau, sans surprise, reste immobile dans ce point-là, en maintenant la distance de sécurité des obstacles.
le bateau avec le côté droit à proximité d’un obstacle, je laisse le joystick de commande et le bateau, sans surprise, reste immobile dans ce point-là, en maintenant la distance de sécurité des obstacles.
DockSense et le système Joystick interagissent avec le GPS et calculent/opposent le courant et les rafales (de travers, dans ce cas).
Toutefois, je sens quelque chose de différente dans cet essai, la sensation est que mes commandes sur le joystick sont légèrement plus “feutrés”, ou mieux, “filtrés” et donc plus fluides, probablement à cause du majeur poids du bateau.
C’est comme si DockSense commence à calculer et intervenir sur la manœuvre en avance et de façon moins invasive, probablement pour n’être pas obligé de faire face à la majeure inertie du bateau.
 En effet, la poussée inertielle sur un bateau de grandes dimensions est plus difficile à opposer, le système l’anticipe et fonctionne parfaitement.
En effet, la poussée inertielle sur un bateau de grandes dimensions est plus difficile à opposer, le système l’anticipe et fonctionne parfaitement.
Mon raisonnement est confirmé au moment où nous nous approchons du ponton pour amarrer. On m’explique que, même si la défense sur le côté de terre est désactivée, DockSense reste en alerte pour éviter la collision du bateau contre l’obstacle. Le résultat est un système sûr et bien “actif”.
Conclusions
Performance excellente pour un système de pointe qui représente la solution définitive pour simplifier la manœuvre d’amarrage, source inépuisable de stress et de dommages à son propre bateau et à ceux des autres. Un gros pas en avant qui minimise instantanément la courbe d’expérience nécessaire (et pas toujours suffisante) pour amarrer en conditions difficiles comme le vent de travers ou le courant.
Certes, il faut s’habituer à un contrôleur silencieux qui, si nécessaire, prend le dessus mais, d’ailleurs, la longue liste des plaisirs offerts par la navigation de plaisance n’inclut pas la la manœuvre d’amarrage. Par conséquent, si l’on considère que le coût d’achat du Raymarine DockSense est considérablement plus bas de tout dommage potentiel auquel on pourrait faire face si le système n’est pas installé à bord, le choix de s’en doter ou non devient incroyablement simple.










